Absolute Encoder
Absolute encoders are used for detecting the position and provide information on the absolute position of a motion platform. For example, this can be realized optically by using an additional Pseudo Random Code (PRC) scale.
DC Motor with ActiveDrive (PWM)
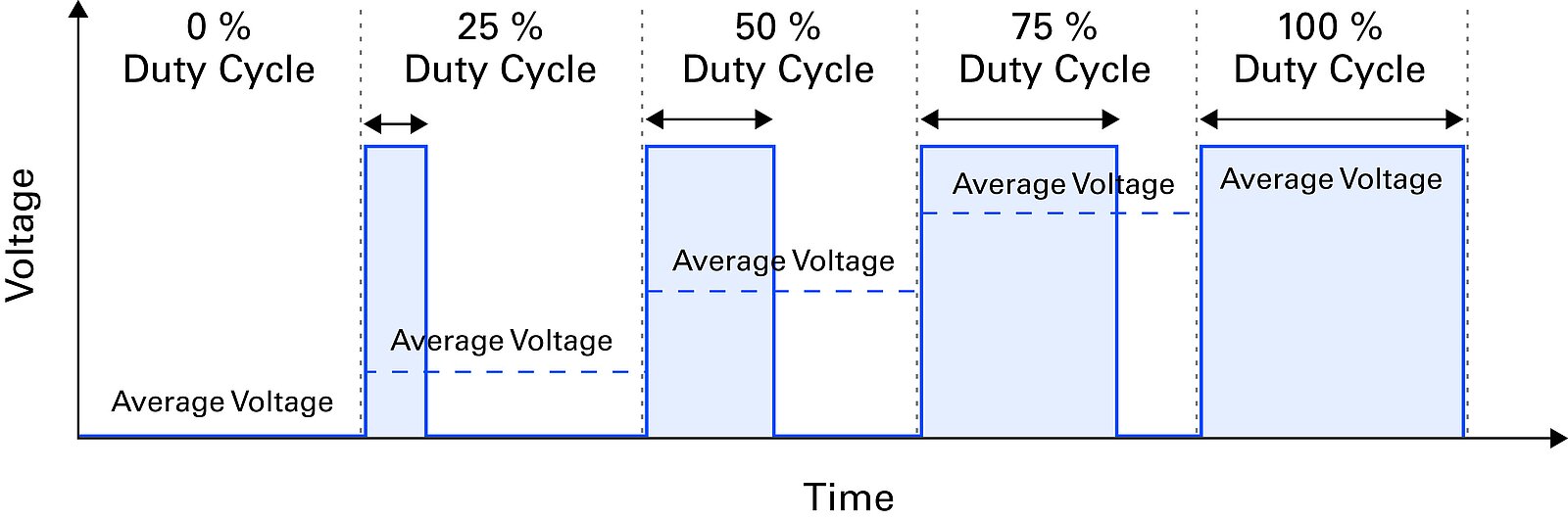
To achieve higher velocities, PI developed ActiveDrive technology for controlling motors with a rated power exceeding the controller's output power. To this end, an amplifier is integrated with the motor in a shielded case. The controller triggers the integrated amplifier via a pulse width modulation (PWM). As illustrated in figure 7, the motor power is regulated via the ratio of on/off time. This requires a separate power adapter for supplying the amplifier and optimized heat dissipation for maintaining precision.
Air Bearing
An air film of a few micrometers is used as bearing. Therefore, air bearings are free of friction and, compared to mechanical bearings, allow a considerably higher guiding accuracy.
Amplifier Classification
PI uses the following amplifier classifications: Charge controlled, switched (class D), linear (class AB).
Amplifier Resolution
Only for digitally controlled amplifiers: Measurement of the smallest digital output value (LSB) in mV.
Area Scan
Motion sequence for a predefined area.
See >> Scan Routine.
Backlash
Position error that occurs when the drive direction is reversed. Backlash is caused by mechanical play between the components of the drivetrain, such as gearheads or bearings, or by friction in the guide system. Backlash also depends on the temperature, acceleration, load, position of the leadscrew, direction, wear etc. Backlash can be reduced by preloading the drivetrain. A method for measuring that determines the platform's position directly and eliminates any errors in the drivetrain (direct measuring).
Ball Screw
In the case of ball screws, only rolling friction occurs, which allows higher speeds, drive performance, and longer lifetime than leadscrews. They are however, not self-locking. The backlash can be minimized adjusting the ball diameter and the thread profile.
Bandwidth
Max. operating frequency of a piezo driver; the measured value is the frequency in kHz that decreases the amplitude by -3 dB. Large signal values related to maximum output voltage. Small signal values at an output voltage of 10 Vpp. The values are displayed in the amplifier operating diagram.
Belt Gears
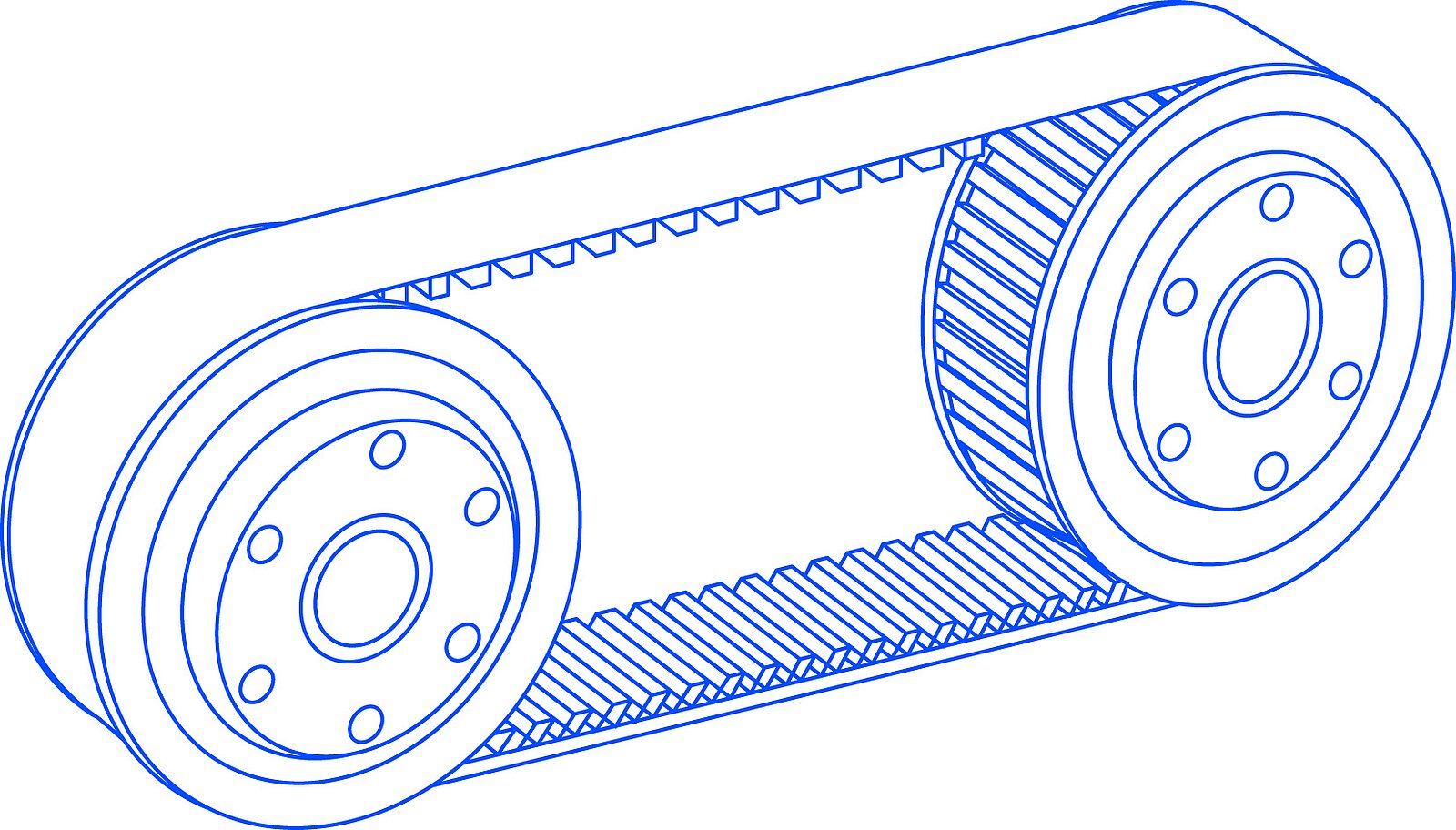
Belt drives consist of two gearwheels connected to each other by a belt. In this way, larger shaft distances can be bridged and higher peripheral speeds can be realized. Maintenance tasks usually involve a belt change or restressing of the belt. The belt limits the temperature range. The occurring pull and push forces usually cause larger shaft loads. PI often uses belt gears in compact positioning stages; e.g., Z or linear stages where the drive is "folded" on the side. Belt drives are suitable for applications in a vacuum up to 10-6 hPa.
Bevel Gears
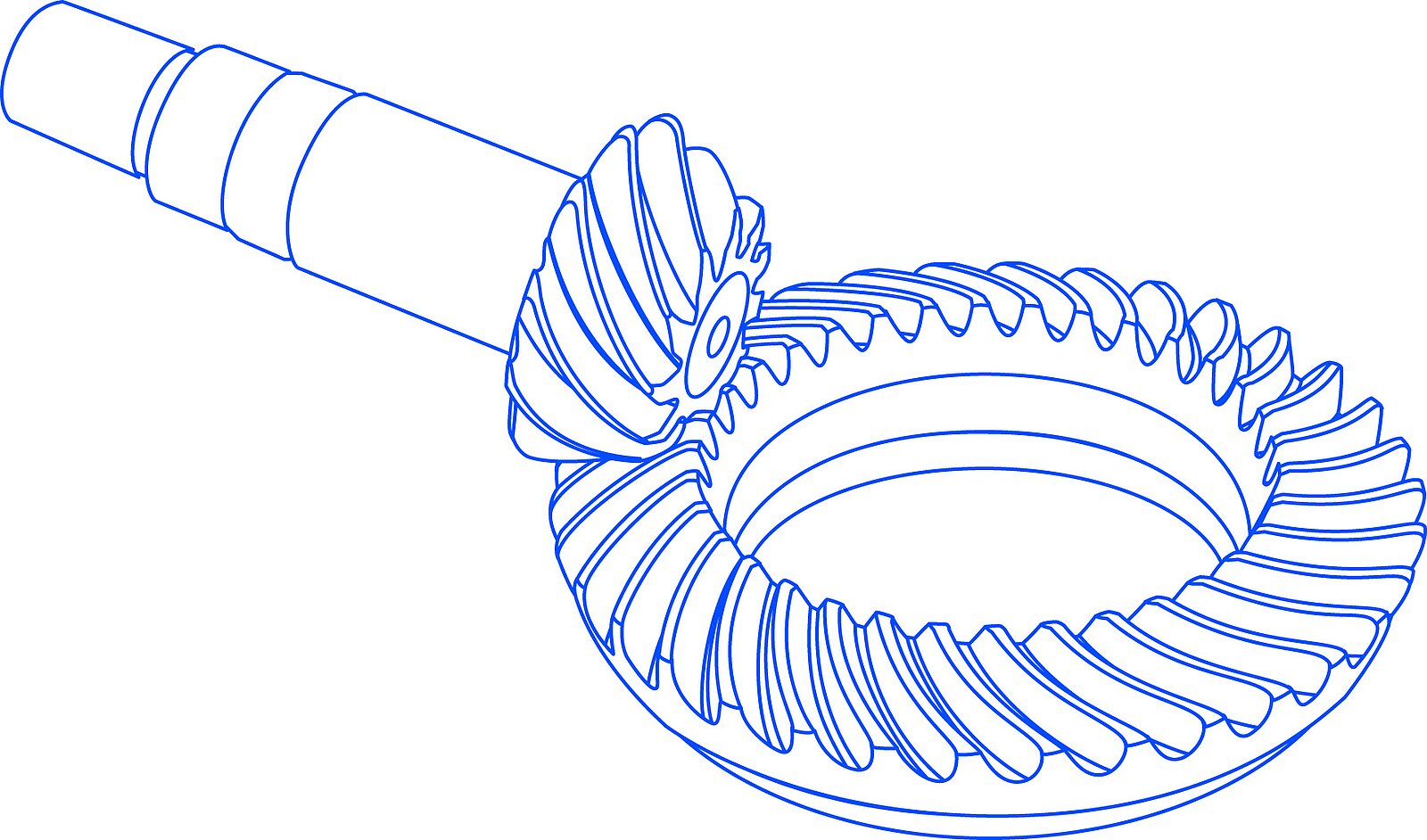
Bevel gears as shown in figure 16 consist of a bevel pinion and a toothed wheel with respective angled teeth. Similar to the worm gear, the energy is transferred at a right angle, but reaches higher torque capacities. High gear ratios can only be achieved with additional spur gear stages. The occurring rolling contact is advantageous. This makes bevel gears low-wear and more efficient than worm gears. However, they are often more expensive. PI deploys bevel gears in customized rotation stages.
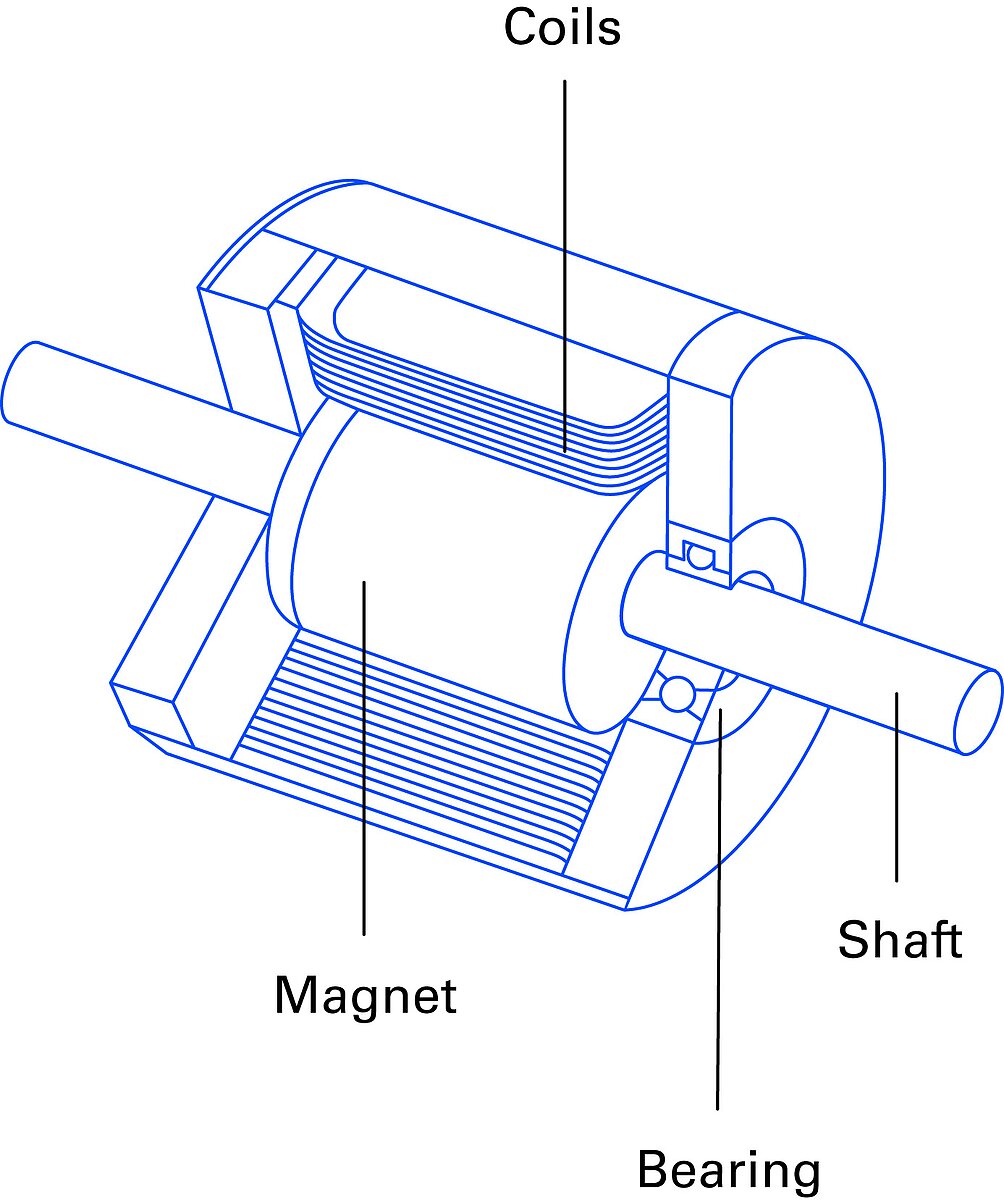
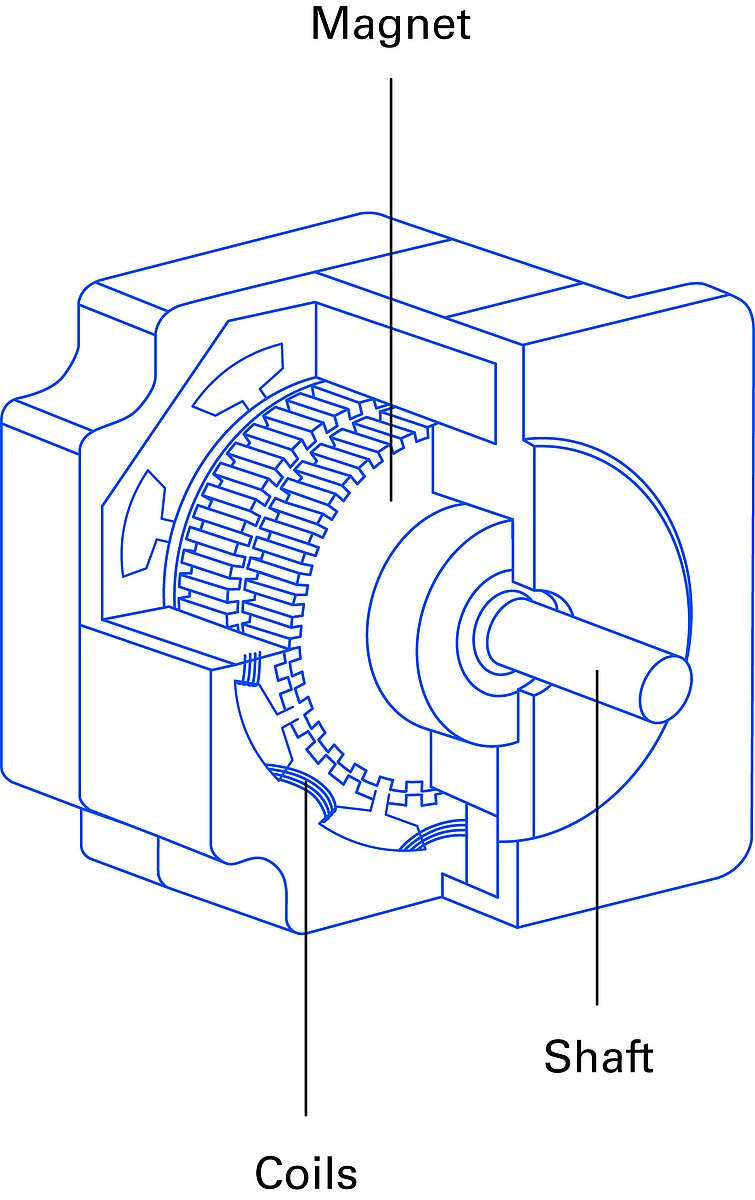
Brushless DC Motor (BLDC) / Synchronous Servo Motor (SSVM)
Due to their brushless commutation, BLDCs (brushless direct current) and SSVM (synchronous servo motors) respectively, provide many advantages compared to brush DC motors:
- The lifetime is mainly limited by the bearings and ends after several ten thousand hours. As a consequence, the motors are more reliable.
- The brushless version allows a smaller, lighter, more efficient, and low-maintenance design while providing the same performance. This results in a large torque to motor size ratio.
- The electronic commutation allows for high dynamics at low temperatures with less vibration.
These are the reasons why BLDCs and SSVMs are preferred in industrial applications instead of DC motors.
Capacitive Base Load (Internal)
For switching amplifiers. Stabilizes the output voltage even without connected capacitive load (piezo actuator). The possible output power of a piezo controller/driver depends on internal and external capacitive loads.
Capacitive Sensor
Capacitive sensors allow contactless measuring, do not introduce much energy into the piezo drive system and have a flat design. Their direct position measuring eliminates the effect of drift for travel ranges from 10 μm up to approx. 2 mm. The design consists of two conductive surfaces: A high-frequency alternating current generates a homogenous electric field between the two surfaces. The overall system consisting of positioning stage, sensor technology, and electronics gains in performance and precision. Customers from the semiconductor industry also appreciate the small and versatile design as well as the lack of thermal build-up in the system.
Center of Rotation
See >> Pivot Point.
Charge-Controlled Piezo Amplifier
The functional principle of the amplifier is based in the charge control. The voltage applied controls the amount of charge that is transmitted to the piezo actuator. The result is a highly repeatable, linear displacement of the piezo actuator in high dynamics operation, without the need for additional position measuring. The typical hysteresis that piezo actuators show when operated with a charge-controlled amplifier is only around 2%.
It is recommended to monitor the piezo temperature to protect the piezo actuators against damage from excessively high temperatures, especially in high-dynamic applications.
Closed-Loop Operation
An integrated position allows the motors can be operated in closed-loop mode. The commanded and actual position reached are measured and compared to each other. Control technology is used to reach the optimum target position, for high position resolution, for uniform feed velocity, and greater dynamic velocity and acceleration ranges.
Closed-Loop Operation of Piezo Actuators and Systems
Piezo servo controllers have additional circuitry for position sensing and servo control that compensates for nonlinearity, hysteresis, and creep. Displacement of the piezo is controlled by an analog signal. Positioning accuracy and repeatability down to the subnanometer range are possible, depending on the piezo mechanics and sensor type. High-resolution position sensors provide optimum positional stability and fast response in the nanometer range. The integrated notch filters (adjustable for each axis) improve stability and allow high bandwidth operation closer to the resonant frequency of the mechanics.
PI piezo drivers for PICMA® actuators have an output voltage range of up to -30 to +135 V to provide enough margin for the servo-controller to compensate e.g. for load changes.
See >> Open-Loop Operation, >> Capacitive Sensors, >> Strain Gauge Sensors.
Coordinate System
The position indicators, the direction of motion and the center of rotation of the hexapod's motion platform are determined by the coordination system. The coordinate systems are always right-handed systems.
In order to be able to adapt the motion trajectory perfectly to the requirements of the application, it is possible to define various coordinate systems that for example, relate to the position of a workpiece or tool.
Crossed Roller Guide
Crossed roller guides are comparatively stiff and manage with low preload. This results in reduced friction with high load capacity, high guiding accuracy, and smooth running. An additional forced cage control helps to prevent the roller bearing from creeping. Nevertheless, this shortens the possible travel range over the same axis length.
Crosstalk
Deviation from the ideal motion in axes perpendicular to the direction of motion.
Angular errors are xrx = θX = roll, xry = θY = pitch, xrz = θZ = yaw.
Linear errors deviations in axial runout such as xty = straightness, xtz = flatness.
See >> Linearity Error.

Data Recorder
Tool for analyzing data and measured values. It saves data from various sources such as position feedback from analog inputs and shows them as a function of time whereby fast visualization is made possible.
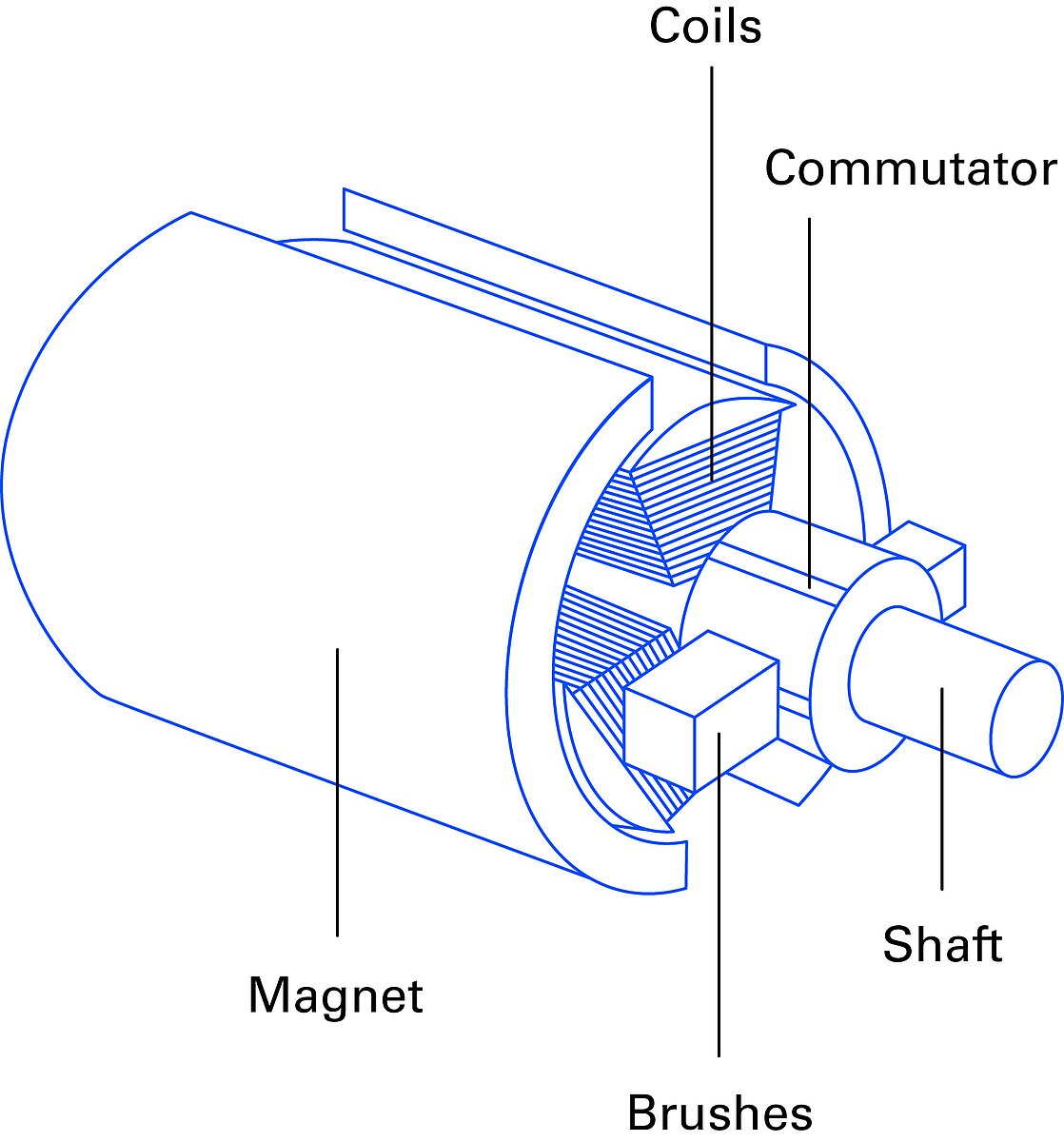
DC Motor (DC)
DC motors offer high torques at a low speed, good dynamics over a large speed range, fast response, low heat generation as well as smooth and vibration-free operation. For example, in a positioning solution, a drive screw pitch of 1 mm/per revolution results in a typical travel velocity of approximately 50 mm/s. However, the wear-prone brushes used for motor commutation can be a disadvantage that limits the lifetime from 1,000 to 5,000 hours.
Applications in a vacuum are only possible up to 10-6 hPa, otherwise the humidity is lacking that is required by the carbon brushes for commutation. Moreover, the brushes exude carbon dust; a problematic effect in vacuum applications, clean rooms, and optical applications.
Design Resolution
The theoretical minimum movement that can be made. Design resolution must not be confused with minimum incremental motion. In indirect position measurement methods, values for drive screw pitch, gear ratio, motor or sensor/encoder resolution, for example, are included in the calculation of the resolution; normally it is considerably below the minimum incremental motion of a mechanics. In direct measurement methods, the resolution of the sensor system is specified.
Direct Metrology
Position measuring is performed with the highest accuracy directly at the motion platform so that nonlinearity, mechanical play or elastic deformation have no influence on position measuring. This is achieved by noncontact optical linear encoders. Precision positioning systems use different encoder types as position sensor: Incremental encoders with different accuracy levels, absolute-measuring encoders that additionally make referencing unnecessary when a machine is switched on again, and for travel ranges under 2 mm, capacitive sensors.
Drag Chain-Compatible Cable
Drag chain-compatible cables are used in the energy supply chain. They remain functional although they are subject to a large number of bending cycles during their lifetime.
Drift
See >> Creep.
Drive Type
Defines the drive types supported by the controller/driver, such as DC motors, piezo walking drives, piezo actuators or linear motors.
Dynamic Digital Linearization
Dynamic Digital Linearization (DDL) describes an iterative preshaping method minimizing the positioning error. DDL for example reduces the phase lag of the commanded and executed trajectory of repeated periodic motion patterns next to other piezoelectric motion effects. This is relevant for scanning applications, where a specific position must be identified and reached again later with high precision, or for applications where a trajectory must be followed very accurately for several processing steps.
Eccentricity

Electrical Capacitance
The piezo capacitance values indicated in the technical data tables are small signal values (measured at 1 V, 1000 Hz, 20 °C, no load). Large-signal values at room temperature are higher by a factor of 1.3 to 1.6. The piezoelectric capacitance changes with amplitude, temperature and load to up to 200% of the unloaded, small-signal capacitance at room-temperature. Detailed information on power requirements can be found in the amplifier frequency response graphs provided for piezo drivers and controllers.
Encoder
An encoder is used for determining the position. Basically, a difference is made between linear and rotary encoders, which, depending on the setup, operate either incrementally or absolutely.
Energy Recovery
Switching amplifier (class D) with pulse width modulation (PWM) for controlling the piezo output voltage. When the piezo actuator is discharged, a patented circuitry for energy recovery stores part of the returning energy in a capacitor and makes it reusable for the next charging cycle. The amplifier reduces the power consumption by up to 80 % compared to linear piezo amplifiers, runs cooler and provides better stability. Piezo drivers that use energy recovery are ideally suited for high-dynamics scanning and switching applications.
EtherCAT® Fieldbus Interface
EtherCAT® (Ethernet for Control Automation Technology) is an open, Ethernet-based fieldbus system that operates in real time. EtherCAT® is a registered trademark and patented technology of Beckhoff Automation GmbH, Germany.
Hexapod controllers from PI support EtherCAT®. The coordination transformation required for the parallel kinematics is done by the hexapod controller and does not adversely affect the PLC.
Extensive Software Package
Each controller from PI is supplied with an extensive software package. The available user programs support the user with startup and parameterization of the overall system. The PIMikroMove user software makes it possible to display and command all connected controllers via one interface. Program interfaces are available for all common programming languages including NI LabVIEW and MATLAB for integrating PI controllers into existing applications. The special software tools for hexapods allow you to simulate motion ranges and determine the permissible forces.
Flatness
See >> Crosstalk.
Flexure Guides
The motion of a solid body is based in elastic deformation of a solid body whereby static, rolling or sliding friction is avoided. Solid body elements such as flexures or guiding systems are distinguished by high stiffness and high load capacity and are virtually insensitive to impact or vibration. They are wear- and maintenance-free, vacuum-compatible, function over a large temperature range and do not require lubrication.
Gearhead
Velocity and torque can be set with gearheads. However, the transmission ratio, which is the proportion between the speed and the gear input, is decisive. The velocity is defined at the gearbox output, so to speak. This ratio is called reduction if it is greater than one, which results in a lower speed with a higher torque. The opposite is true for higher speeds. Typical types of gears include for example, worm gears, spur gears, planetary gears, bevel gears, and belt gears.
See >> Worm Gearhead, >> Bevel Gearhead, >> Spur Gearhead, >> Planetary Gearhead, >> Harmonic Drive Gearhead, >> Belt Gearhead.
Gear Motors
Gear motors are used for precision positioning tasks to provide higher torques and higher resolutions at lower speeds. In slow applications, the rotor moves comparably fast thanks to the gear ratio. Without gears, undesired cogging torques may occur due to the low rotor speed. Moreover, gears support the holding forces in vertical applications. Often, less effort is required for the control loop because, thanks to the gearhead, the motor is only subject to a load on the motion platform that is reduced by the square of the transmission ratio.
However, a geared motor is not play-free and additional friction reduces efficiency. For this reason, gear manufacturers often offer suitable lubrication to guarantee the expected lifetime. The lifetime is subject mainly to input speed and output torque as well as operating, ambient, and installation conditions. In customized solutions, the lifetime can be prolonged by self-lubricating bearings, ball or ceramic bearings, metal gearwheels, and special greases.
Strictly speaking, drive screws also act as gears in gear spindle positioning systems because speed adjustments are achieved on the expense of the torque in dependence of the spindle pitch. To this effect, a motion platform moves twice as fast at 50% of the torque with a spindle pitch of 2 mm/revolution compared to a spindle pitch of 1 mm/revolution. For some applications, however, an actual gear is required to act between motor and drive screw. PI deploys various gear types for this scenario.
Gradient Search
Mountaineering algorithm for optimizing the signal.
See >> Scan Routine.
Harmonic Drive Gears
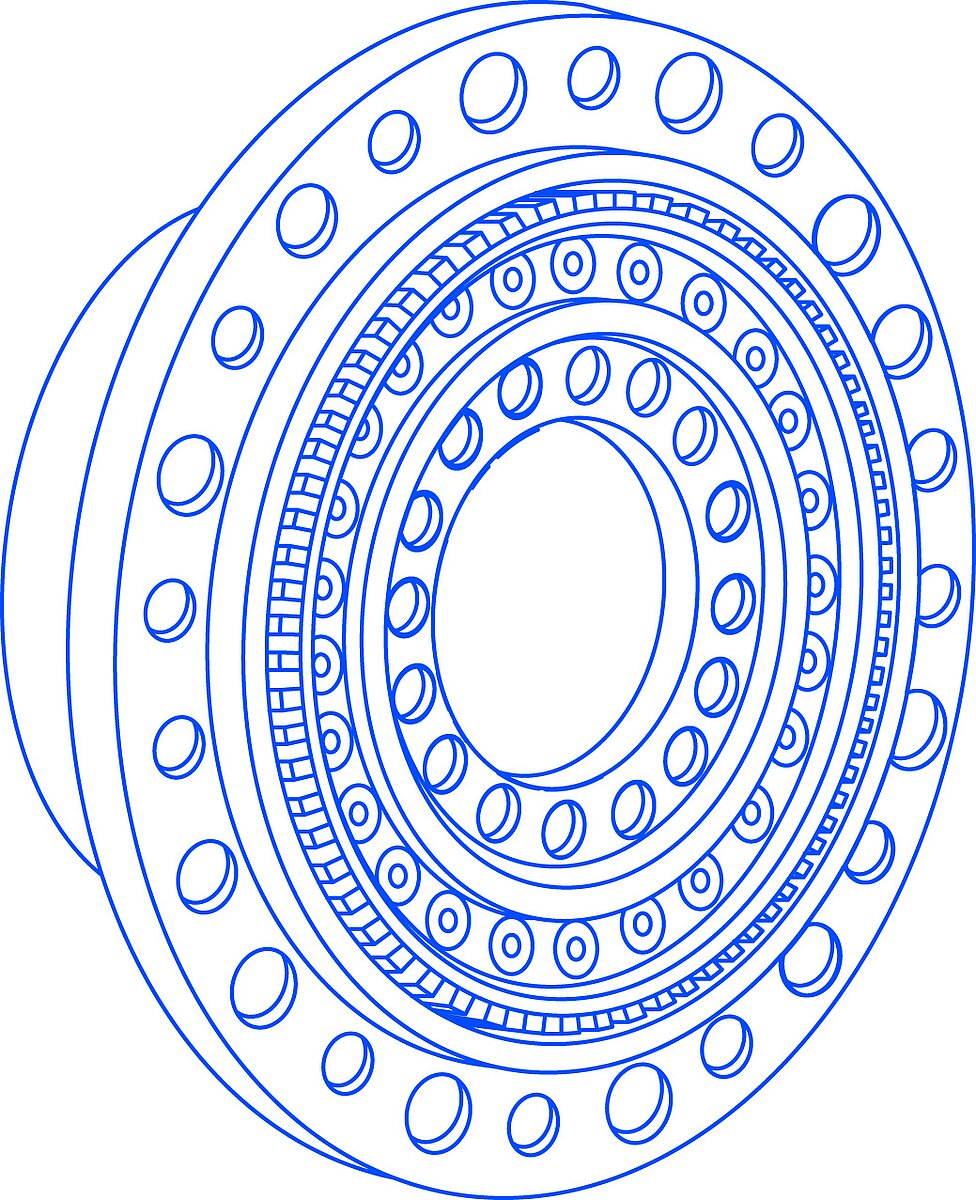
Harmonic drive gears, are distinguished by the elastic properties of the transmission element, allowing for high transmission gear ratios, high torque capacities, high linear torsional stiffness, high degrees of efficiency as well as play-free operation. The elastic transmission element is an elliptical disk that deforms a thin steel bush with external teeth. The steel bush is located on an outer ring with ball bearing and internal teeth. When deformation occurs, the internal and external teeth interlock play-free in the area of the larger elliptical axis. Additionally, harmonic drive gears offer the possibility of using a central hollow shaft; e.g., for cables, shafts, or laser beams. However, these gears are comparatively expensive due to their complex, compact, and maintenance-free setup. PI sometimes uses harmonic drive gears for customized solutions to achieve particularly high positioning accuracy and repeatability thanks to the zero-play characteristic of these gears.
ID Chip
An ID chip is in the connector of many piezo stages. When the stage is calibrated at the factory with a digital controller, the calibration data is saved together with specific product information on the ID chip. When switched on, digital controllers read the data from the ID chip of the connected stage. Stages, whose ID chip contains the calibration data, can therefore be connected to any suitable digital electronics without renewed calibration.
Incremental Encoder
When incremental encoders are in motion, they generate impulses that are counted by the controller. However, in contrast to absolute encoders, it is a question of determining a relative position. To determine an absolute position, a limit switch or reference switch signal must also be referenced.
Lateral Force, Max.
Maximum lateral force perpendicular to the positioning direction. For piezo systems the lateral force is limited by the piezo actuator and the flexure designs. For XY stages the push/pull force capacity of the respective orthogonal module (in its positioning direction) limits the lateral force that can be tolerated.
Leadscrew
Leadscrews can achieve very high resolutions with smooth running and are often preloaded by springs to minimize backlash. This results in sliding friction and therefore a self-locking effect. However, this reduces the velocity and the lifetime.
Linear Amplifier / Driver
Most piezo drivers use linear amplifiers (class AB) to generate the output voltage. The amplifier output voltage is controlled in open-loop (voltage-controlled) piezo mode by an analog input signal optionally combined with a DC offset.
Linear Ball Guide
Linear ball guides require exact tolerances between the guide and bearing in order to keep the play and friction as low as possible. This limits the load capacity. Due to the simple design, they are only suitable for inexpensive applications with comparatively low requirements.
Linear Encoder
Linear encoders measure the position directly at the motion platform. As a rule, this means that a higher accuracy is achieved compared to rotary encoders, because nonlinearity, mechanical play, and elastic deformation have no influence.
Linear Motor
A linear motor is an electromagnetic direct drive that generates straight linear motion. The range of a linear motor is practically unlimited. A linear measuring system is always required for motion and positioning; open loop operation of a linear motor is not possible. The linear motor does not require mechanical coupling elements to convert the rotation of the motor into linear motion as is the case with servo motors. Typically, 3-phase motors are used.
Typical applications are found in the electronics and semiconductor industry, medicine and biotechnology, in tool machines with a strong focus on laser cutting but also in other fields where precision, dynamics, and productivity are important.
Linearity Error
Deviation in motion direction, of measured position from commanded position (positioning accuracy). Measured with an external, traceable device. The value is given as a percentage of the entire measuring range.
Measurement of the linearity error: The target and measured actual values of the positions are plotted against each other, a line is drawn through the first and last data point, and the maximum absolute deviation is determined. A linearity error of 0.1% corresponds to an area of ±0.1% around the ideal line. Example: A linearity error of 0.1% over a measuring range of 100 µm produces a possible maximum error of 0.1 µm.
Linearization
Digital piezo controllers offer the best positioning accuracy through linearization algorithms with higher-order polynomials. The linearity error with capacitive sensors can therefore be reduced to less than 0.01%.
See >> Dynamic Digital Linearization, >> Sensor Linearization.
Magnetic Bearings
Magnetic levitation allows excellent linear and rotational guiding accuracy on a plane. Flatness errors are measured and compensated by very accurate noncontact sensors. Contrary to air bearings, which are also very accurate, magnetic bearings can also be used in vacuum.
Minimum Incremental Motion
The smallest motion that can be executed repeatedly is called minimum incremental motion, or typical resolution, and is determined by measurements. The data table shows typical measured values. In most cases, minimum incremental motion differs strongly from the design resolution, which can be considerably smaller in numerical values.
See also >> Design Resolution.
NEXACT® Piezo Walking Drive
Precision piezo motor that moves a runner by means of piezo bending elements. The drives are very compact and achieve relatively high velocities around 10 mm/s, and forces up to 10 N. A suitable selection of the piezo elements optimizes step size, clamping force, velocity, and stiffness for the respective applications.
NEXLINE® Piezo Walking Drive
High-load piezo motor that combines piezo clamping and shear actuators, in order to move a runner. The drives feature particularly high force and stiffness of several 100 N. They are capable of dynamically compensating oscillations in the range of a few micrometers with nanometer resolution. The drives are designed for positioning and holding forces up to 800 N and work at velocities of about 1 mm/s.
Noise
For capacitive sensors. In extended measurement ranges, noise is considerably higher than in the nominal measurement range.
Nonlinearity
See >> Linearity Error.
Open-Loop Operation
The actuator or motor is used without a position sensor. Open-loop operation is ideal for applications where fast response and very high resolution with maximum bandwidth are essential. Here, commanding and reading the target position in absolute values is either not important or carried out by external position sensors.
The piezo actuator's displacement corresponds approximately to the drive voltage; With open-loop control, creep, nonlinearity, and hysteresis remain uncompensated.
Open-loop operation is not possible for electro-magnetic direct drives such as linear motors and voice coil drives.
Operating Limits
Values measured at an ambient temperature of 20°C. A sine is used as control signal in open-loop operation. The amplifier works linearly within the operating limits, in particular without thermal limitation.
Operating Temperature Range
In any case, the device can be operated safely in the maximum permissible temperature range. To avoid internal overheating however, full performance is no longer available above a certain temperature (maximum operating temperature under full load). It may be be necessary to recalibrate or adjust the zero point if the operating temperature changes. Performance specifications in the datasheet apply only to room temperature.
P
Patents
Parallel Kinematics, Hexapods
Parallel-Kinematic Piezo Stages
Parallel Metrology
Peak Current
PICA / PICA Power
PICMA® Multilayer Piezo Actuators
PICMAWalk
Piezoelectric Inertia Drive
PiezoMove®
Piezoresistive Sensor (PRS)
PIglide Air Bearing Technology
PILine® Ultrasonic Piezomotors
PIMag® Magnetic Linear Motors
PIMag® Voice Coil
Pivot Point
PIRest
Pitch
Planetary Gears
Power Consumption
Preloaded Piezo Actuator
Profile Generator
Pulse Width Modulation (PWM)
Push/Pull Force Capacity (in Positioning Direction)
PZT
Parallel Kinematics, Hexapods
Hexapods are parallel-kinematic systems with six drives that are connected directly to a single platform. This makes it possible for users to position objects automatically in all degrees of freedom, X, Y, Z, and rotatory and, depending on the drive, with an accuracy in the micrometer range or lower. The parallel-kinematic system is very stiff, with only a low passive weight to move and, with the corresponding design, can carry loads up to several tons. Users are able to arbitrarily choose the reference coordinate system and, today, workers are now working together with hexapods on the production line. The user integrates the system into the automation environment via EtherCAT.

Parallel-Kinematic Piezo Stages
Piezo stages reach optimum trajectory accuracy with a parallel-kinematic setup that uses capacitive sensors for parallel measuring. All actuators act directly on one motion platform in a parallel-kinematics, multi-axis system. This means that all axes move the same minimized mass and can be designed with identical dynamic properties. Parallel-kinematic systems have additional advantages over serially stacked systems, including more compact construction and no cumulative errors from the individual axes. Multi-axis nanopositioning systems equipped with direct metrology are able to measure platform position in all degrees of freedom against one common reference. In such systems, undesirable motion from one actuator in the direction of another (crosstalk) is detected immediately and actively compensated by the servo loops. This active trajectory control concept can keep deviation from a trajectory to under a few nanometers, even in dynamic operation.
Parallel Metrology
Each sensor measures the position of the same motion platform in the respective degree of freedom. This keeps crosstalk of all axes inside the servo loop and allows it to be corrected automatically.
Peak Current
Available only for short periods of time, typically less than a few millisecond in the case of piezo amplifiers/controllers. It is used to estimate the possible dynamics with a certain capacitive load. Note: In this case, the piezo controller/ driver does not necessarily work linearly.
PICA / PICA Power
PICA piezo actuators are specifically designed for high duty cycle applications. PICA Power actuators are additionally optimized for high-temperature working conditions.
All materials used are specifically matched for robustness and lifetime. Endurance tests on PICA drives proved consistent performance, even after billions (1,000,000,000 ) of cycles. The combination of high displacement and low electrical capacitance provides for excellent dynamic behavior with reduced driving power requirements.
PICMA® Multilayer Piezo Actuators
PICMA® actuators take advantage of the indirect piezoelectric effect and achieve high forces with relatively low voltages. They only need a small amount of installation space. At the same time, the PICMA® actuators are very dynamic and can reach a position with a hitherto unattained precision. This is the reason why they are used as micropump applications in metering technology. Due to their ceramic insulation, PICMA® actuators exhibit high reliability and climate resistance. PI also equips PICMA® actuators with individual connectors for customer applications.
PICMAWalk
PICMAWalk drives achieve feed forces up to 50 N and holding forces to 60 N. The maximum velocity is 15 mm/s. PICMAWalk uses the proven PICMA multilayer piezo actuators. That means lower piezo control voltages to 120 V. PICMA® piezo actuators also ensure a long lifetime and the outstanding reliability of the PICMAWalk technology.
Piezoelectric Inertia Drive
Piezo inertia drives are space-saving and affordable piezo-based drives with relatively high holding forces and a theoretically unlimited travel range. The drives acting directly on the runner achieve velocities of more than 5 mm/s with an operating frequency of max. 20 kHz. The Q-Motion drive runs silently at an operating frequency of 20 kHz. The drive is self-locking at rest, requires no current, and does not generate any heat. It holds the position with maximum force. It is therefore suitable for battery-powered, mobile applications with a low number of load cycles.
PiezoMove®
PiezoMove® actuators combine guided motion with long travel ranges up to 1 mm as well as an optional sensor which provides precision up to 10 nanometers. The high-precision, frictionless flexure guides achieve very high stiffness as well as extremely low lateral displacement.
This makes them easier to handle than a simple piezo actuator, but still keeps them extremely compact. The number and size of the piezo actuators used determine stiffness and force generation. Due to these features, their small dimensions and the inexpensive design, the PiezoMove® lever actuators are particularly suitable for OEM applications.
PiezoWalk® Walking Drive
PiezoWalk® drives take advantage of the piezo walking principle and combine subnanometer resolution with high forces, a robust design, and a scalable travel range. Industry customers use walking drives for travel ranges greater than 1 mm and to hold a stable position with nanometer precision resolution. PI (Physik Instrumente) offers walking drives with high feed forces as well as positioning and holding forces, but also relatively high velocities, and they also have a long lifetime in a vacuum.
See >> NEXLINE®, >> NEXACT®, and >> PICMAWalk.
PIglide Air Bearing Technology
The PIglide air bearing technology allows friction-free positioning with a high guiding accuracy up to 5 µrad over 100 mm. This technology improves the position resolution and makes it possible to realize constant-velocity scanning. The repeatability is only a few encoder impulses. A similar precision in the nanometer range is also possible with flexure-guided piezo nanopositioners, however, only over considerably shorter travel ranges.
PILine® Ultrasonic Piezomotors
PILine® Ultrasonic piezo motors are precise, dynamic, small, and noiseless, and are also self-locking. As a result, they don’t have to be supplied with current when at rest and that, in turn, reduces the energy requirements of the application. For this reason and due to their small size, the drives are very popular for mobile devices in the optical industry and measuring technology where they can replace classical drive technology.
PIMag® Magnetic Linear Motors
Magnetic direct drives from PI (Physik Instrumente) provide a direct and stiff connection between the load to be moved and the drive. The industry demand is particularly high when objects need to be positioned with high dynamics and precision. Thanks to the smooth-running precision linear guides with crossed roller bearings, these types of linear motor stages are particularly suitable for applications that require constant-velocity scanning. The drives operate without contact and therefore very reliable. Users can integrate the magnetic direct drives into existing machines and systems quickly and easily via standardized fieldbus systems.
PIMag® Voice Coil
Thanks to their low weight and friction-free drive principle, voice coil drives are small and particularly suitable for applications that require high dynamics and high velocities over limited travel ranges - for example, in medical technology. Voice coil drives have a greater advantage for the customer when compared to traditional drive screw-based solutions, particularly with respect to wear and dynamics. High scan frequencies and precision positioning are possible with these drives, because they are free of hysteresis effects.
See >> Voice Coil Drive.
PIMikroMove
User software with graphical user interface (GUI) for controlling positioning systems from PI, irrespective of their drive principle.
PIRest
Piezo actuator technology for active adjustment of consistently stable gaps of several micrometers with subnanometer precision. The PIRest actuator is only powered during the actual positioning sequence and holds its position without power.
Pitch
See >> Crosstalk.
Planetary Gears
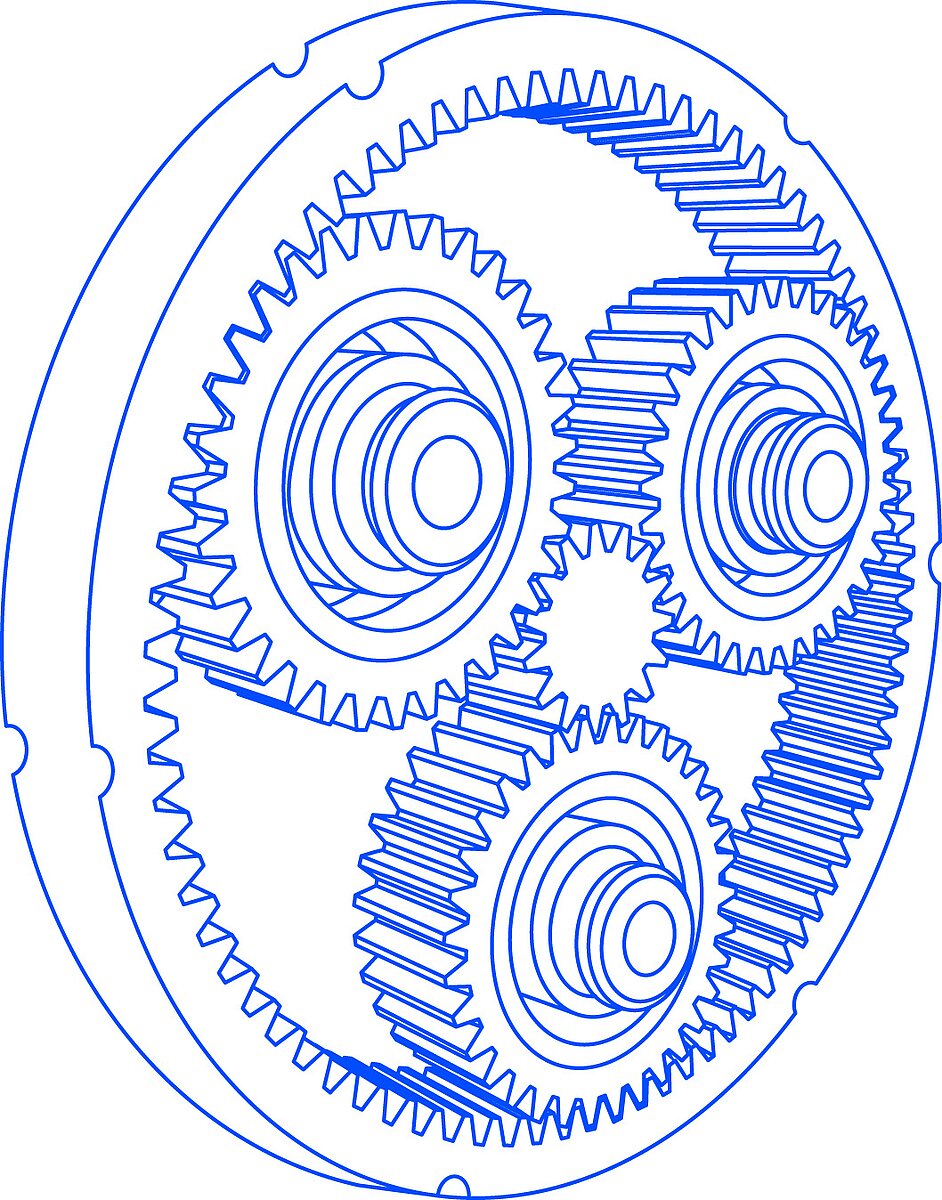
Planetary gears consist of a central sun wheel connected to a shaft, and other planet wheels that are located within a ring wheel. They are suitable for transferring the highest torque because the load is distributed via several toothed wheels. In this manner, high gear ratios can be realized in very compact assembly spaces. Often, the input stage's toothed wheels are made of a synthetic material to reduce high speed noises. For applications in vacuum, high temperatures or for very high torques, the input stage is preferably made of steel. In addition to spur gears, planetary gears are generally used for the gear motors in PI's linear stages.
Preloaded Piezo Actuator
Piezoelectric stack actuators are protected by an internal preload. The preload ensures a safe operation in any kind of application scenario and is ideal for dynamic applications and for tensile loads as well. Preloaded piezo actuators are intended for integration into a customer’s system and have no guides. An external guide is required if motion crosstalk in individual axes cannot be tolerated.
Profile Generator
Functionality of motor controllers that allows motion profiles such as linear interpolation, point-to-point, trapezoid, and double bends. Several axes are referred to as an electronic gear function.
Pulse Width Modulation (PWM)
PWM-controlled motors allow control of the (motor) performance with a high-frequency-signal. This means that the power signal can be separated from the digital control signal.
PWM controllers are used for example, with high-performance switching amplifiers for piezo actuators, or for controlling electric motors such linear motors or voice coil drives. The >> ActiveDrive Motor is a special feature from PI, see there.
Push/Pull Force Capacity (in Positioning Direction)
Specifies the maximum forces that can be applied to the piezo system along the active axis. Limited by the piezoelectric material and the flexure. If larger forces are applied, the piezo actuator, the flexures or the sensor could be damaged. Limiting the force must be considered in dynamic applications.
Example: the dynamic forces generated by sinusoidal operation at 500 Hz, 20 µm peak-to-peak, 1 kg moved mass, are approximately ±100 N.
Recirculating Ball Bearing Guide
Due to their design, recirculating ball bearings are already insensitive to creeping. For example, they are suitable for high-precision axes, which are often used for scanning smaller areas. When assembled correctly, they offer a high load capacity and at the same time, longer lifetime, no maintenance, and guiding accuracy.
Reference Switch
A reference point is required in conjunction with an incremental position encoder to determine the absolute position. Function: Optical, magnetic.
Repeatability
Typical values in closed-loop operation mode (RMS, 1 σ). The repeatability is expressed as a percentage of the total travel range or bevel square. Repeatability may be significantly better for smaller distance travelled.
Resolution
Position resolution relates to the smallest change in displacement that can still be detected by the measuring devices. The resolution in piezo-based positioning systems and piezo actuators is basically unlimited because it is not affected by static or sliding friction. Instead, the equivalent to electronic noise is specified. Values are typical results (RMS, 1 σ).
Resonant Frequency
No load: First resonant frequency in positioning direction.
With load: Resonant frequency of the loaded system.
Resonant frequency does not specify the maximum operating frequency. PI recommends an operating frequency in open-loop of max. one third of the resonant frequency. Customized systems may differ from that. Please contact PI for more details.
Rise Time
Time constant of the controller/amplifier: That time required for increasing the maximum voltage range from 10% to 90%.
Ripple, Noise, 0 to 100 kHz
Residual ripple of voltage in mVpp with unique frequency. Noise over the entire frequency range.
Roll
See >> Crosstalk.
Rotational Crosstalk
See >> Crosstalk.
Rotary Encoder
Rotary encoders measure the position indirectly because for example, they are mounted directly on the motor shaft. That means that they are attached to a rotating part of the drivetrain. Easy installation of the sensors is an advantage but backlash and mechanical play affect the resulting measurement.
Scan Routine
Algorithm that runs a motion sequence and allows the associated data to be evaluated; e.g., search for an optimum analog input signal. Examples include "area scan" and "gradient search".
Sensor Bandwidth
Measured value that specifies the frequency used to decrease the amplitude decreased by -3 dB.
Sensor Linearization
For capacitive sensors, the signal conditioning electronics demonstrates a notably low noise level. The integrated linearization system (ILS) compensates for the influences of parallelism errors between the capacitor plates.
Sensor Resolution
The smallest calculable increment that can be detected by the measuring system used. Rotary encoder: Number of counts per screw rotation. Linear encoder: Smallest increment still detected by the sensor system. The sensor can be the critical element of position resolution so it may be necessary to specify the sensor resolution separately.
See >> Design Resolution.
Serial Kinematics
Stacked or nested setup of a multi-axis motion system. Each actuator acts on its own platform. Actuator and motion axis are uniquely assigned to each other. Assembly and control of several axes are therefore relatively easy. The dynamic characteristics depend on the individual axis. Any guiding errors cumulate and the overall guiding accuracy is poorer when compared to >> Parallel Kinematics, see there.
Serial Metrology
A position sensor is assigned to each servo-controlled motion axis. Undesired crosstalk or guiding errors unnoticed and uncorrected.
Servo Motor
A motor with position detection and control is called a servo motor. The motor itself is often a DC motor. Servo motors offer high torques at a low speed, good dynamics over a large speed range, fast response, low heat generation as well as smooth and vibration-free operation. Either rotary or absolute encoders are used for detecting the position. A servo amplifier takes care of amplifying the signal and controlling the motor parameters. This is normally a PID (Proportional, Integral, Derivative) controller with additional filters in order to exploit the above-mentioned characteristics as best as possible.
SpaceFAB Design
SpaceFABs are partly parallel-kinematic setups which constant strut lengths and a particularly low profile. Each XY arrangement of linear stages in the SpaceFAB drives three individual struts. The mechanical layout allows an asymmetrical setup, e.g., longer travel ranges in the desired direction of motion.
Specifications
The performance specifications are checked before dispatch. Not all specifications can be combined. The performance specifications apply to room temperature (22 ±3 °C) and systems in closed-loop operation are calibrated at this temperature (specifications for different operating temperatures on request). It may be necessary to reset the operating parameters when operating at considerably lower or higher temperatures. Custom designs for ultralow or ultrahigh temperatures on request.
Spur Gears
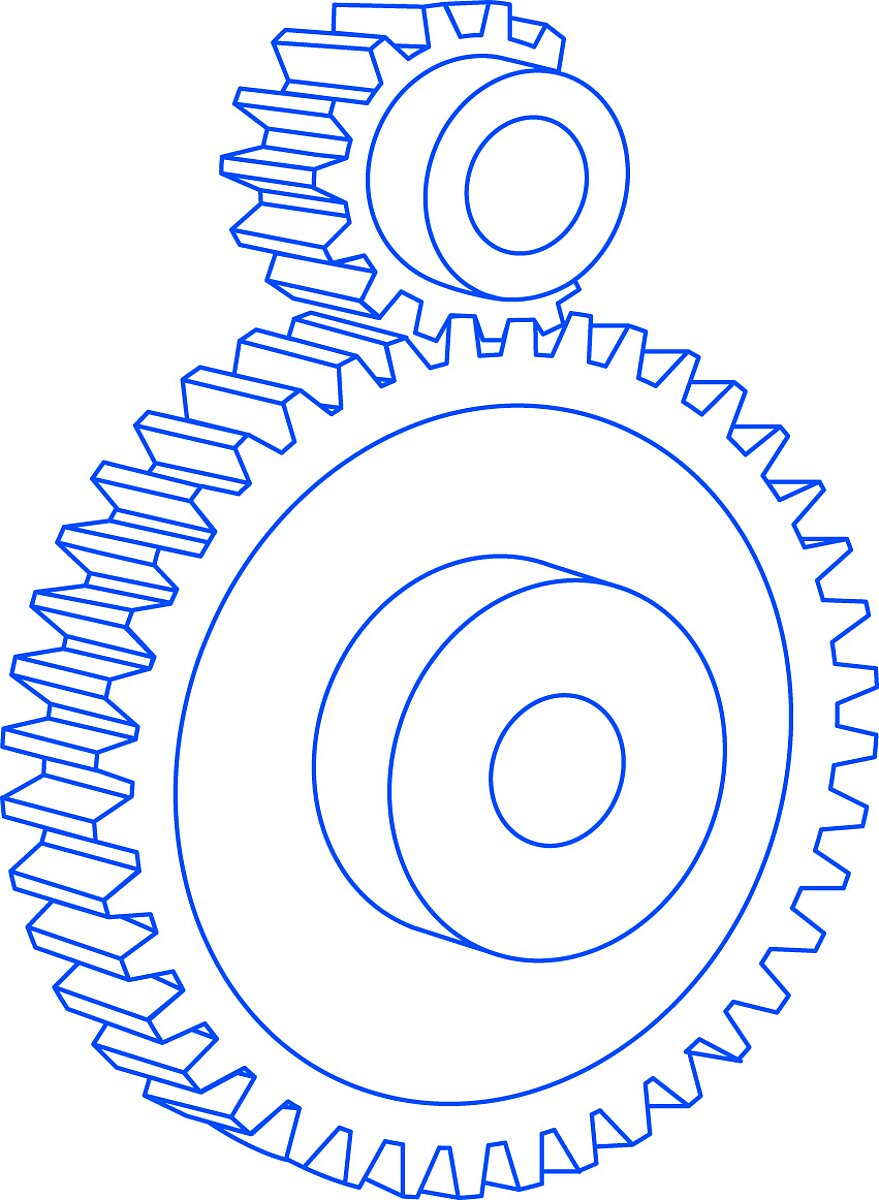
Spur gears consist of two parallel but different-sized toothed wheels. Due to the simple design, spur gears can be manufactured very easily and robustly. Thanks to their simple structure, spur gears are easy to manufacture and robust. All-metal models fulfill high requirements with respect to an even and smooth run and particularly play-free models can be realized for applications where high precision at low torque is needed. To achieve this, the preload is set by inverse twisting of the gear trains and their tension on the motor pinion. In addition to planetary gears, spur gears are the normally the standard choice gear motors in linear stages from PI.
Stepper Motor, 2-Phase Stepper Motor (2SM)
Stepper motors only take discrete positions within one revolution. Due to their quantized steps, stepper motors only offer reduced momentum compared to DC motors. High speeds can only be achieved with a large number of steps at the expense of the torque, because the windings need to be energized against one another in order to set the intermediate steps.
Stepper motors can be set up for applications in a vacuum, have a long lifetime, and can be applied for positioning tasks without the requirement of an encoder. Open-loop operation of stepper motors does not cause position jitter because it is caused by the feedback loop in closed-loop operation. Often, a mechanical damper is applied in the form of a handwheel to enhance smooth running and to suppress resonances.
Stepper motors are available in different configurations.
Stiffness
Spring constant, nonlinear for piezoelectric materials. The positioner's static large signal stiffness is specified for the positioning direction at room temperature in the datasheets. Small signal stiffness and dynamic stiffness may differ for example, because of effects caused by the active nature of piezoelectric material or compound effects.
Straightness
See >> Crosstalk.
Strain Gauge Sensor (SGS)
Strain gauge sensors consist of a thin metal wire packaged on a foil (SGS), or a semiconductor foil (PRS), which is attached to the piezo actuator or to the guiding system (lever, flexure) of a flexure positioner. This type of position measurement is done with contact and indirectly, since the position of the motion platform is derived from a measurement on the lever, guide or piezo stack. Strain gauge sensors derive the position information from their expansion and the resulting change in resistance. Full-bridge circuits with several strain gauge sensors per axis improve thermal stability.
Switching Amplifier / Driver
See >> Energy Recovery.
Synchronous Servo Motor (SSVM)
A servo motor that is designed as a synchronous machine. This type of motor for example, can be realized from a brushless DC servo motor with sine commutation (see brushless >> DC Motor and >> Servo Motor).
Threaded Roller Drive Screw
In the case of threaded roller drive screws, the contact surface between the drive screw, roller, and nut is considerably larger than with ball screw drives. This results in a very high stiffness and higher loads are possible. There are various versions, for example, guided planetary rollers without roller recirculation or rotating rollers, i.e., with roller recirculation, which allow even smaller pitches.
Tip/Tilt Mirrors
Tip/tilt mirrors, fast steering mirrors, and tip/tilt platforms are used for example, for active optics and for laser beam deflection in laser processing and laser beam steering. These special piezo stages mostly provide two orthogonal tip/tilt axes with a common center of rotation. Their parallel-kinematic design creates identical performance in both tip/tilt axes, with a common fixed center of rotation and no change of polarization direction. The bandwidth, resonant frequencies, and acceleration are often higher than with voice coil or galvanometer scanners. Tilting mirrors are wear free due to the flexure guidings used in the design.
Torque Motor
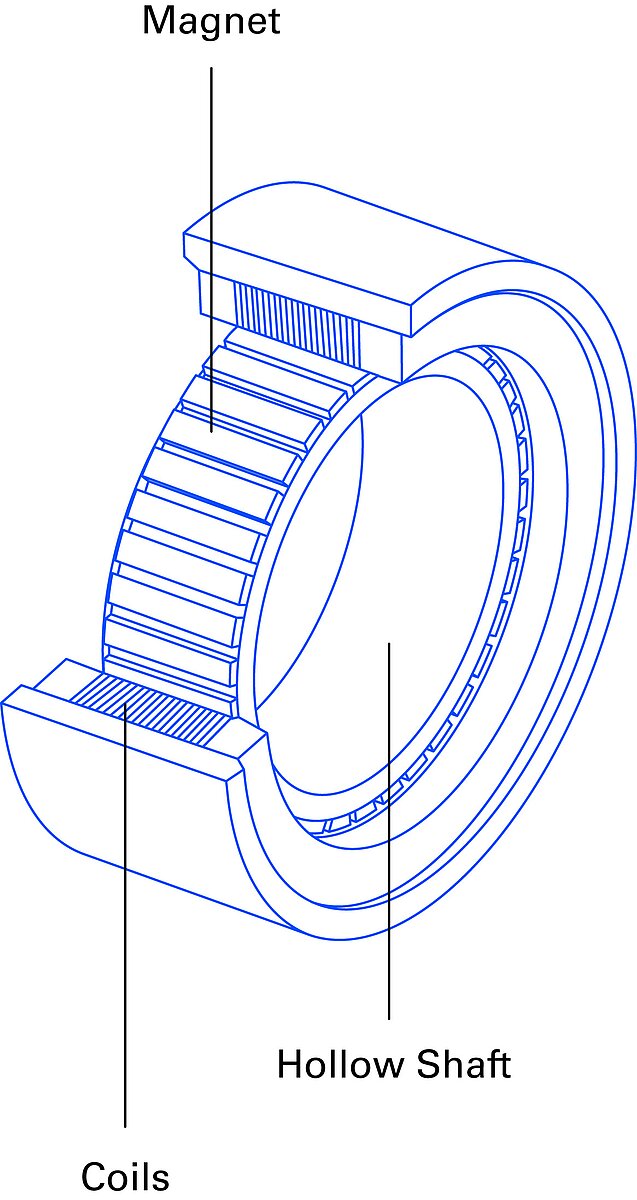
Torque motors are zero-play drives with often large radial dimensions. They can have a very flat design. The large radial dimensions allow for hollow shafts and large apertures, respectively, e.g., to conduct laser beams and cables. The zero-play allows high positioning accuracy and high drive rigidity, resulting in high repeatability. The high drive torque enables high acceleration and therefore high dynamics. Additional features include high torsional rigidity, high peak torques, high degrees of efficiency, as well as very smooth running.
Among others, torque motors are suitable for high load applications on multi-axis or rotation stages thanks to their compact design with respect to torque and rotational symmetry.
Trajectory Control
Precautions for avoiding deviations from the specified trajectory; Can be passive (e.g., flexure guide) or active (e.g., using additional active axes and sensors).
Trajectory Generator
A profile generator for multi-axis systems with known kinematics and interpolation. Hexapod controllers support linear interpolation, point-to-point, trapezoid and S curves.
See >> Profile Generator.
Useful Piezo Load
For switching amplifiers. The possible output power of a piezo controller/driver depends on internal and external capacitive loads.
User Software and Functions
PI provides an extensive software package with all controllers including user software and programming support such as: PIMikroMove, PI General Command Set (GCS). Drivers for NI LabVIEW, shared libraries for Windows and Linux. Compatible with µManager, MATLAB, among others. Wave generator. Linearization. Data recorder. Autozero. Trigger I/O. Software-configurable parameters.
Vacuum-Compatible Versions
In a large number of industry sectors, production in a vacuum is becoming increasingly more important. Therefore, PI (Physik Instrumente) offers various different drive technologies to its customers that can be operated in a vacuum of 10–7 or even 10–10 hPa. This includes piezo actuators that work in strong magnetic fields and in a cryogenic environment, piezo systems with travel ranges lower than 1.5 mm and subnanometer precision, piezo motors in a variety of designs with respect to force, dynamics, and travel range, as well as classical motorization with specially designed DC or stepper motors that allow greater travel ranges.
Voice Coil Drives
These friction-free electromagnetic linear drives are characterized by their good dynamics, albeit with relatively low holding force.
Voice coil motors are direct drives. The drive principle is the technical implementation of the Lorentz force: The force that a live conductor exerts in a permanent magnetic field is proportional to the magnetic field strength and the current. The motion controller controls the force via PWM control. The drive is combined with a measuring system for precision positioning and operated in a closed loop. The travel ranges of voice coil drives are therefore limited by the technology and are between 0.5 mm and 25 mm.
Typical applications include short-range motion with fast settling times, applications with low noise generation, or sensitive programmable force controls.
Wave Generator
Each axis can be controlled by a wave generator that outputs waveforms. The wave generator is particularly suited to dynamic applications where the axis works in a freely defined custom motion profiles.
Workspace
The entirety of all combinations of translations and rotations that the hexapod can reach from the current position from the current position is referred to as the "workspace".
Worm Gears
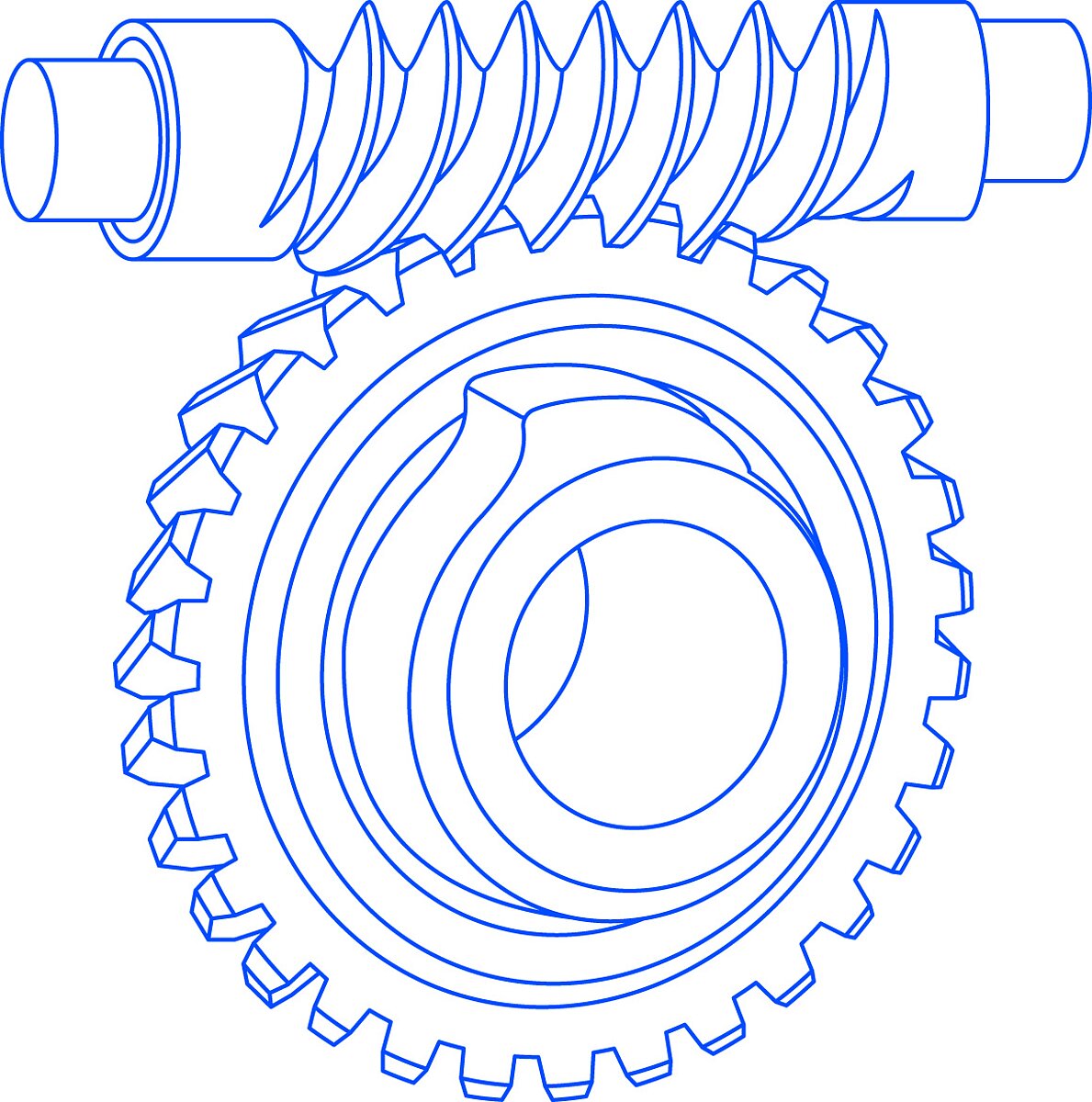
Worm gears consist of a shaft with helical mount and a worm wheel. The force is transferred by sliding friction at a right angle. For this reason, the worm shaft has high self-locking forces making additional brakes in some applications unnecessary. Sliding friction however, causes a low degree of efficiency, high wear, and potentially high temperatures. Typically, worm gears can achieve high gear ratios at one translation level, which makes them comparatively inexpensive. PI often uses worm gears for rotation stages because they transmit motion at a right angle. This allows lateral alignment of the motor on the rotation stage.
Yaw
See >> Crosstalk.