|
Active axes
|
X ǀ Y
|
X ǀ Y
|
X ǀ Y
|
X ǀ Y
|
X ǀ Y
|
X ǀ Y
|
X ǀ Y
|
X ǀ Y
|
X ǀ Y
|
X ǀ Y
|
|
|
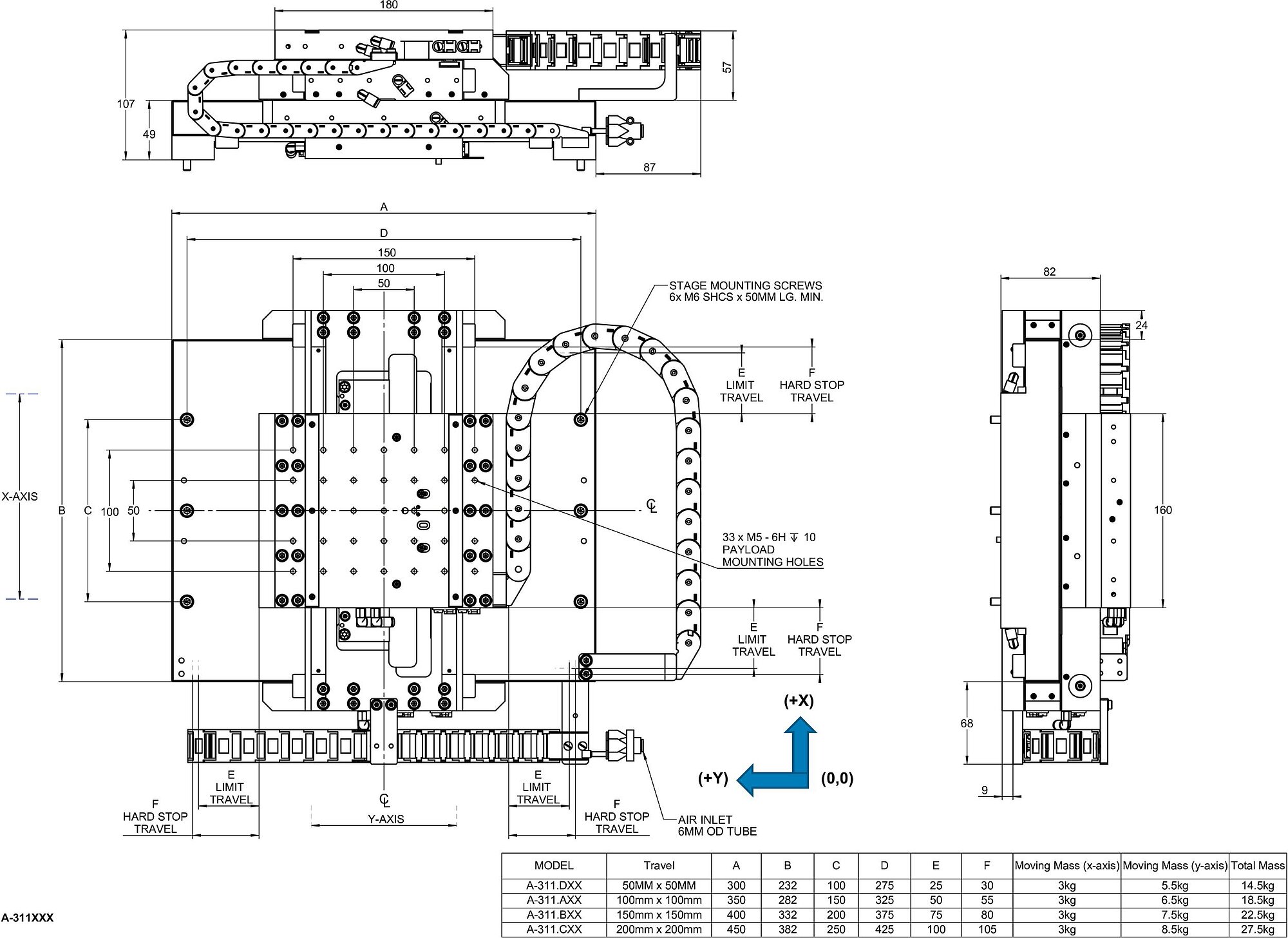
Travel range in X
|
50 mm
|
50 mm
|
100 mm
|
100 mm
|
150 mm
|
150 mm
|
200 mm
|
200 mm
|
300 mm
|
300 mm
|
|
|
Travel range in Y
|
50 mm
|
50 mm
|
100 mm
|
100 mm
|
150 mm
|
150 mm
|
200 mm
|
200 mm
|
300 mm
|
400 mm
|
|
|
Acceleration in X, unloaded
|
27.5 m/s²
|
27.5 m/s²
|
27.5 m/s²
|
27.5 m/s²
|
27.5 m/s²
|
27.5 m/s²
|
27.5 m/s²
|
27.5 m/s²
|
10 m/s²
|
10 m/s²
|
max.
|
|
Acceleration in Y, unloaded
|
15 m/s²
|
15 m/s²
|
13 m/s²
|
13 m/s²
|
11 m/s²
|
11 m/s²
|
10 m/s²
|
10 m/s²
|
10 m/s²
|
10 m/s²
|
max.
|
|
Maximum velocity in X, unloaded
|
2000 mm/s
|
2000 mm/s
|
2000 mm/s
|
2000 mm/s
|
2000 mm/s
|
2000 mm/s
|
2000 mm/s
|
2000 mm/s
|
1000 mm/s
|
1000 mm/s
|
|
|
Maximum velocity in Y, unloaded
|
2000 mm/s
|
2000 mm/s
|
2000 mm/s
|
2000 mm/s
|
2000 mm/s
|
2000 mm/s
|
2000 mm/s
|
2000 mm/s
|
1000 mm/s
|
1000 mm/s
|
|
|
Orthogonality
|
± 12.5 µrad
|
± 12.5 µrad
|
± 12.5 µrad
|
± 12.5 µrad
|
± 12.5 µrad
|
± 12.5 µrad
|
± 12.5 µrad
|
± 12.5 µrad
|
± 5 µrad
|
± 25 µrad
|
typ.
|
|
Straightness error E_XY (straightness)
|
± 0.25 µm
|
± 0.25 µm
|
± 0.25 µm
|
± 0.25 µm
|
± 0.25 µm
|
± 0.25 µm
|
± 0.5 µm
|
± 0.5 µm
|
± 1 µm
|
± 1 µm
|
max.
|
|
Straightness error E_YX (straightness)
|
± 0.25 µm
|
± 0.25 µm
|
± 0.25 µm
|
± 0.25 µm
|
± 0.25 µm
|
± 0.25 µm
|
± 0.5 µm
|
± 0.5 µm
|
± 1 µm
|
± 1 µm
|
max.
|
|
Straightness error E_ZX (flatness)
|
± 0.25 µm
|
± 0.25 µm
|
± 0.25 µm
|
± 0.25 µm
|
± 0.5 µm
|
± 0.5 µm
|
± 0.75 µm
|
± 0.75 µm
|
± 1.5 µm
|
± 1.5 µm
|
max.
|
|
Straightness error E_ZY (flatness)
|
± 0.25 µm
|
± 0.25 µm
|
± 0.25 µm
|
± 0.25 µm
|
± 0.5 µm
|
± 0.5 µm
|
± 0.75 µm
|
± 0.75 µm
|
± 1.5 µm
|
± 1.5 µm
|
max.
|
|
Angular error E_AY (pitch)
|
± 10 µrad
|
± 10 µrad
|
± 12.5 µrad
|
± 12.5 µrad
|
± 17.5 µrad
|
± 17.5 µrad
|
± 20 µrad
|
± 20 µrad
|
± 40 µrad
|
± 20 µrad
|
max.
|
|
Angular error E_BX (pitch)
|
± 10 µrad
|
± 10 µrad
|
± 12.5 µrad
|
± 12.5 µrad
|
± 17.5 µrad
|
± 17.5 µrad
|
± 20 µrad
|
± 20 µrad
|
± 40 µrad
|
± 20 µrad
|
max.
|
|
Angular error E_CX (yaw)
|
± 5 µrad
|
± 5 µrad
|
± 5 µrad
|
± 5 µrad
|
± 7.5 µrad
|
± 7.5 µrad
|
± 10 µrad
|
± 10 µrad
|
± 20 µrad
|
± 10 µrad
|
max.
|
|
Angular error E_CY (yaw)
|
± 5 µrad
|
± 5 µrad
|
± 5 µrad
|
± 5 µrad
|
± 7.5 µrad
|
± 7.5 µrad
|
± 10 µrad
|
± 10 µrad
|
± 20 µrad
|
± 10 µrad
|
max.
|
|
Positioning
|
A-311.DA1
|
A-311.DB1
|
A-311.AA1
|
A-311.AB1
|
A-311.BA1
|
A-311.BB1
|
A-311.CA1
|
A-311.CB1
|
A-311.FB1
|
A-311.GB1
|
Tolerance
|
|
Positioning accuracy in X, calibrated
|
± 0.2 µm
|
± 0.2 µm
|
± 0.2 µm
|
± 0.2 µm
|
± 0.2 µm
|
± 0.2 µm
|
± 0.2 µm
|
± 0.2 µm
|
± 0.2 µm
|
± 0.2 µm
|
typ.
|
|
Positioning accuracy in X, uncalibrated
|
± 1 µm
|
± 1 µm
|
± 1.5 µm
|
± 1.5 µm
|
± 2 µm
|
± 2 µm
|
± 2.5 µm
|
± 2.5 µm
|
—
|
—
|
typ.
|
|
Positioning accuracy in Y, calibrated
|
± 0.2 µm
|
± 0.2 µm
|
± 0.2 µm
|
± 0.2 µm
|
± 0.2 µm
|
± 0.2 µm
|
± 0.2 µm
|
± 0.2 µm
|
± 0.2 µm
|
± 0.2 µm
|
typ.
|
|
Positioning accuracy in Y, uncalibrated
|
± 1 µm
|
± 1 µm
|
± 1.5 µm
|
± 1.5 µm
|
± 2 µm
|
± 2 µm
|
± 2.5 µm
|
± 2.5 µm
|
—
|
—
|
typ.
|
|
Bidirectional repeatability in X
|
0.1 µm
|
0.1 µm
|
0.1 µm
|
0.1 µm
|
0.1 µm
|
0.1 µm
|
0.1 µm
|
0.1 µm
|
0.1 µm
|
0.1 µm
|
max.
|
|
Bidirectional repeatability in Y
|
0.1 µm
|
0.1 µm
|
0.1 µm
|
0.1 µm
|
0.1 µm
|
0.1 µm
|
0.1 µm
|
0.1 µm
|
0.1 µm
|
0.1 µm
|
max.
|
|
Reference switch
|
Encoder index
|
—
|
Encoder index
|
—
|
Encoder index
|
—
|
Encoder index
|
—
|
—
|
—
|
|
|
Limit switches
|
Hall effect, N/O contact, 5 V to 24 V, open collector
|
—
|
Hall effect, N/O contact, 5 V to 24 V, open collector
|
—
|
Hall effect, N/O contact, 5 V to 24 V, open collector
|
—
|
Hall effect, N/O contact, 5 V to 24 V, open collector
|
—
|
—
|
—
|
|
|
Integrated sensor
|
Incremental linear encoder
|
Absolute linear encoder
|
Incremental linear encoder
|
Absolute linear encoder
|
Incremental linear encoder
|
Absolute linear encoder
|
Incremental linear encoder
|
Absolute linear encoder
|
Absolute linear encoder
|
Absolute linear encoder
|
|
|
Sensor signal
|
Sin/cos, 1 V peak-peak
|
BiSS-C
|
Sin/cos, 1 V peak-peak
|
BiSS-C
|
Sin/cos, 1 V peak-peak
|
BiSS-C
|
Sin/cos, 1 V peak-peak
|
BiSS-C
|
BiSS-C
|
BiSS-C
|
|
|
Sensor signal period
|
20 µm
|
—
|
20 µm
|
—
|
20 µm
|
—
|
20 µm
|
—
|
—
|
—
|
|
|
Sensor resolution
|
1.2 nm
|
1 nm
|
1.2 nm
|
1 nm
|
1.2 nm
|
1 nm
|
1.2 nm
|
1 nm
|
1 nm
|
1 nm
|
|
|
Drive Properties
|
A-311.DA1
|
A-311.DB1
|
A-311.AA1
|
A-311.AB1
|
A-311.BA1
|
A-311.BB1
|
A-311.CA1
|
A-311.CB1
|
A-311.FB1
|
A-311.GB1
|
Tolerance
|
|
Drive type
|
Ironless 3-phase linear motor
|
Ironless 3-phase linear motor
|
Ironless 3-phase linear motor
|
Ironless 3-phase linear motor
|
Ironless 3-phase linear motor
|
Ironless 3-phase linear motor
|
Ironless 3-phase linear motor
|
Ironless 3-phase linear motor
|
Ironless 3-phase linear motor
|
Ironless 3-phase linear motor
|
|
|
Nominal voltage
|
48 V
|
48 V
|
48 V
|
48 V
|
48 V
|
48 V
|
48 V
|
48 V
|
48 V
|
48 V
|
|
|
Peak voltage
|
80 V
|
80 V
|
80 V
|
80 V
|
80 V
|
80 V
|
80 V
|
80 V
|
300 V
|
80 V
|
|
|
Nominal current, RMS
|
3.2 A
|
3.2 A
|
3.2 A
|
3.2 A
|
3.2 A
|
3.2 A
|
3.2 A
|
3.2 A
|
2.9 A
|
3.2 A
|
typ.
|
|
Peak current, RMS
|
6.9 A
|
6.9 A
|
6.9 A
|
6.9 A
|
6.9 A
|
6.9 A
|
6.9 A
|
6.9 A
|
10 A
|
6.9 A
|
typ.
|
|
Drive force in X
|
39 N
|
39 N
|
39 N
|
39 N
|
39 N
|
39 N
|
39 N
|
39 N
|
58 N
|
39 N
|
typ.
|
|
Drive force in Y
|
39 N
|
39 N
|
39 N
|
39 N
|
39 N
|
39 N
|
39 N
|
39 N
|
58 N
|
39 N
|
typ.
|
|
Peak force in X
|
85 N
|
85 N
|
85 N
|
85 N
|
85 N
|
85 N
|
85 N
|
85 N
|
200 N
|
85 N
|
|
|
Peak force in Y
|
85 N
|
85 N
|
85 N
|
85 N
|
85 N
|
85 N
|
85 N
|
85 N
|
200 N
|
85 N
|
|
|
Force constant
|
12.3 N/A
|
12.3 N/A
|
12.3 N/A
|
12.3 N/A
|
12.3 N/A
|
12.3 N/A
|
12.3 N/A
|
12.3 N/A
|
19.9 N/A
|
12.3 N/A
|
|
|
Resistance phase-phase
|
3.6 Ω
|
3.6 Ω
|
3.6 Ω
|
3.6 Ω
|
3.6 Ω
|
3.6 Ω
|
3.6 Ω
|
3.6 Ω
|
5.6 Ω
|
3.6 Ω
|
typ.
|
|
Inductance phase-phase
|
1.24 mH
|
1.24 mH
|
1.24 mH
|
1.24 mH
|
1.24 mH
|
1.24 mH
|
1.24 mH
|
1.24 mH
|
1.8 mH
|
1.24 mH
|
|
|
Back EMF phase-phase
|
10.1 V·s/m
|
10.1 V·s/m
|
10.1 V·s/m
|
10.1 V·s/m
|
10.1 V·s/m
|
10.1 V·s/m
|
10.1 V·s/m
|
10.1 V·s/m
|
16 V·s/m
|
10.1 V·s/m
|
max.
|
|
Pole pitch N-N
|
30 mm
|
30 mm
|
30 mm
|
30 mm
|
30 mm
|
30 mm
|
30 mm
|
30 mm
|
30 mm
|
30 mm
|
|
|
Mechanical Properties
|
A-311.DA1
|
A-311.DB1
|
A-311.AA1
|
A-311.AB1
|
A-311.BA1
|
A-311.BB1
|
A-311.CA1
|
A-311.CB1
|
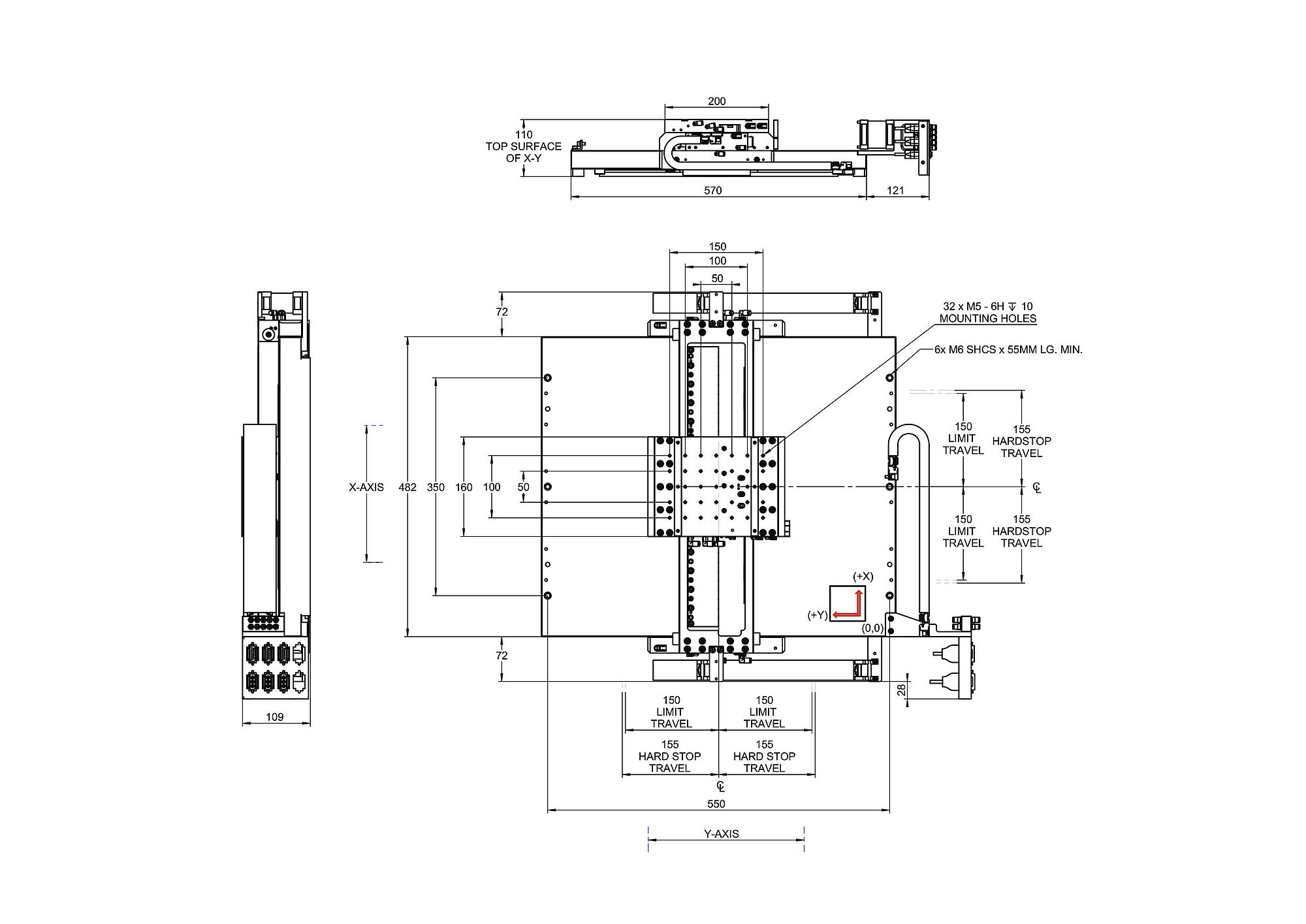
A-311.FB1
|
A-311.GB1
|
Tolerance
|
|
Permissible push force in Z
|
147 N
|
147 N
|
147 N
|
147 N
|
147 N
|
147 N
|
147 N
|
147 N
|
147 N
|
147 N
|
max.
|
|
Moved mass in X, unloaded
|
3000 g
|
3000 g
|
3000 g
|
3000 g
|
3000 g
|
3000 g
|
3000 g
|
3000 g
|
4000 g
|
4000 g
|
|
|
Moved mass in Y, unloaded
|
5500 g
|
5500 g
|
6500 g
|
6500 g
|
7500 g
|
7500 g
|
8500 g
|
8500 g
|
8500 g
|
8500 g
|
|
|
Guide
|
Air bearing with air preload
|
Air bearing with air preload
|
Air bearing with air preload
|
Air bearing with air preload
|
Air bearing with air preload
|
Air bearing with air preload
|
Air bearing with air preload
|
Air bearing with air preload
|
Air bearing with vacuum preload
|
Air bearing with vacuum preload
|
|
|
Overall mass
|
14500 g
|
14500 g
|
18500 g
|
18500 g
|
22500 g
|
22500 g
|
27500 g
|
27500 g
|
48000 g
|
55000 g
|
|
|
Material
| Hardcoat aluminum, stainless steel mounting hardware | Hardcoat aluminum, stainless steel mounting hardware | Hardcoat aluminum, stainless steel mounting hardware | Hardcoat aluminum, stainless steel mounting hardware | Hardcoat aluminum, stainless steel mounting hardware | Hardcoat aluminum, stainless steel mounting hardware | Hardcoat aluminum, stainless steel mounting hardware | Hardcoat aluminum, stainless steel mounting hardware | Hardcoat aluminum, stainless steel mounting hardware | Hardcoat aluminum, stainless steel mounting hardware |
|
|
Miscellaneous
|
A-311.DA1
|
A-311.DB1
|
A-311.AA1
|
A-311.AB1
|
A-311.BA1
|
A-311.BB1
|
A-311.CA1
|
A-311.CB1
|
A-311.FB1
|
A-311.GB1
|
Tolerance
|
|
Operating temperature range
|
+15 to +25 °C
|
+15 to +25 °C
|
+15 to +25 °C
|
+15 to +25 °C
|
+15 to +25 °C
|
+15 to +25 °C
|
+15 to +25 °C
|
+15 to +25 °C
|
+15 to +25 °C
|
+15 to +25 °C
|
|
|
Connector
|
D-sub 9W4 (m)
|
D-sub 9W4 (m)
|
D-sub 9W4 (m)
|
D-sub 9W4 (m)
|
D-sub 9W4 (m)
|
D-sub 9W4 (m)
|
D-sub 9W4 (m)
|
D-sub 9W4 (m)
|
D-sub 3W3 (m)
|
D-sub 3W3 (m)
|
|
|
Sensor connector
|
D-sub 15 (m)
|
D-sub 15 (m)
|
D-sub 15 (m)
|
D-sub 15 (m)
|
D-sub 15 (m)
|
D-sub 15 (m)
|
D-sub 15 (m)
|
D-sub 15 (m)
|
D-sub 15 (m)
|
D-sub 15 (m)
|
|
|
Operating pressure
|
415 to 485 (60 to 70 psi) kPa
|
415 to 485 (60 to 70 psi) kPa
|
415 to 485 (60 to 70 psi) kPa
|
415 to 485 (60 to 70 psi) kPa
|
415 to 485 (60 to 70 psi) kPa
|
415 to 485 (60 to 70 psi) kPa
|
415 to 485 (60 to 70 psi) kPa
|
415 to 485 (60 to 70 psi) kPa
|
415 to 485 (60 to 70 psi) kPa
|
415 to 485 (60 to 70 psi) kPa
|
|
|
Air consumption
|
56 L/min
|
56 L/min
|
56 L/min
|
56 L/min
|
56 L/min
|
56 L/min
|
56 L/min
|
56 L/min
|
56 L/min
|
56 L/min
|
max.
|
|
Air quality
|
Clean (filtered up to 1.0 µm or better) - ISO 8573–1 class 1 ǀ Oil free - ISO 8573–1 class 1 ǀ Dry (-15 °C dew point) - ISO 8573–1 class 3
|
Clean (filtered up to 1.0 µm or better) - ISO 8573–1 class 1 ǀ Oil free - ISO 8573–1 class 1 ǀ Dry (-15 °C dew point) - ISO 8573–1 class 3
|
Clean (filtered up to 1.0 µm or better) - ISO 8573–1 class 1 ǀ Oil free - ISO 8573–1 class 1 ǀ Dry (-15 °C dew point) - ISO 8573–1 class 3
|
Clean (filtered up to 1.0 µm or better) - ISO 8573–1 class 1 ǀ Oil free - ISO 8573–1 class 1 ǀ Dry (-15 °C dew point) - ISO 8573–1 class 3
|
Clean (filtered up to 1.0 µm or better) - ISO 8573–1 class 1 ǀ Oil free - ISO 8573–1 class 1 ǀ Dry (-15 °C dew point) - ISO 8573–1 class 3
|
Clean (filtered up to 1.0 µm or better) - ISO 8573–1 class 1 ǀ Oil free - ISO 8573–1 class 1 ǀ Dry (-15 °C dew point) - ISO 8573–1 class 3
|
Clean (filtered up to 1.0 µm or better) - ISO 8573–1 class 1 ǀ Oil free - ISO 8573–1 class 1 ǀ Dry (-15 °C dew point) - ISO 8573–1 class 3
|
Clean (filtered up to 1.0 µm or better) - ISO 8573–1 class 1 ǀ Oil free - ISO 8573–1 class 1 ǀ Dry (-15 °C dew point) - ISO 8573–1 class 3
|
Clean (filtered up to 1.0 µm or better) - ISO 8573–1 class 1 ǀ Oil free - ISO 8573–1 class 1 ǀ Dry (-15 °C dew point) - ISO 8573–1 class 3
|
Clean (filtered up to 1.0 µm or better) - ISO 8573–1 class 1 ǀ Oil free - ISO 8573–1 class 1 ǀ Dry (-15 °C dew point) - ISO 8573–1 class 3
|
|
|
Recommended controllers/drivers
| A-81x, A-82x | A-81x, A-82x | A-81x, A-82x | A-81x, A-82x | A-81x, A-82x | A-81x, A-82x | A-81x, A-82x | A-81x, A-82x | A-81x, A-82x | A-81x, A-82x |
|